卡尔曼滤波学习笔记
卡尔曼滤波
前言
最近在学习卡尔曼滤波算法,这其中用到了一些数学和现代控制理论的知识。由于我在学习之前没有啥知识储备,在网上看了很多博客、花了很多时间之后依然是一种似懂非懂的感觉。终于找到了一些很棒的教程,感觉算是稍微理解了一些,整理了一些学习笔记,梳理思路,也方便日后查阅。
教程链接
数学基础
协方差矩阵
将方差、协方差在一个矩阵中表现出来,体现变量间的联动关系
假设有X,Y,Z三组数据,每组数据有n个
方差:
方差越大,数据波动越大
协方差:
协方差越小,X,Y相关性越低
协方差矩阵:
过渡矩阵
过渡矩阵a用以计算协方差矩阵P:
结合公式容易理解:(此处为3x3矩阵)
被减数即为原矩阵,而减数则为平均值矩阵
状态空间方程
变量说明:
- :实际状态值
- :上一时刻状态值
- $u_k-1$:控制输入量
- A、H、B:转换矩阵
- $Z_k$:测量值
- $W_{k-1}$:过程噪声
- $V_k$:测量噪声
关于传递方程:
如果我们掌握了一个物体的运动规律,那么这个时刻的状态可以通过上一个时刻的状态计算出来。但是也不能保证完全精准,所以添加了过程噪声——W
举个例子——经典的阻尼弹簧振子模型:
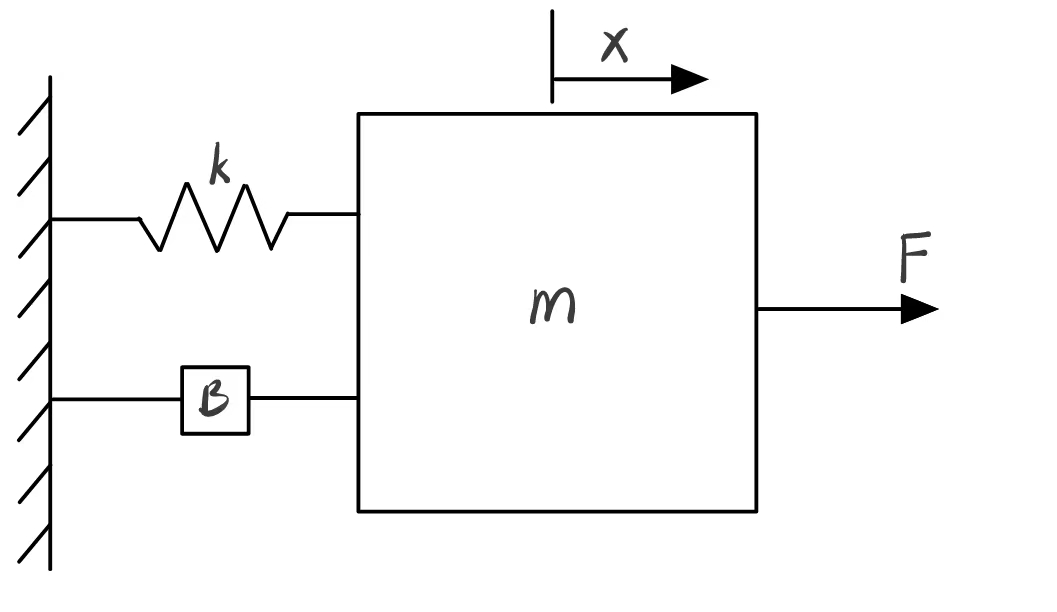
弹簧恢复力 = kX,阻力 = Bv。将X的导数v记作$\dot{X}$,X的二阶导a记作$\ddot{X}$,便可以得到:
取状态变量X1为位移,X2为速度,F记为控制输入u,根据之前公式可得:
写成矩阵的形式就是:
对应着状态趋势矩阵与状态的关系:
写成离散的形式就是:
当然最后加上不确定因素W
关于测量方程:
一般而言我们可能会习惯把待求量放在等式左边,已知量放在等式右边。但是在这里$Z_k$才是我们实际获得的数据。
关于转换矩阵H,一般我们无法直接测得需要的待测量,所以会测量其他量计算出待测量。举个例子
激光测距仪测距:发射激光,根据返回用时计算距离。直接获得的物理量是 时间($Z_n$),而我们想获得的 距离($X_n$),于是有了转换矩阵 H($ \begin{bmatrix}\frac{2}{c}\end{bmatrix}$)
整体介绍
预测
先验估计方程:
先验误差协方差矩阵:
矫正
卡尔曼增益:
后验估计:
后验误差协方差矩阵:
变量说明
- :k时刻先验估计值——算出来的
- $\hat{X}_k$:最优估计值
- $\hat{X}_{k-1}$:k-1时刻最优估计值
- $u_k-1$:控制输入量
- $K_k$:卡尔曼增益
- $Z_k$:测量值——测出来的
- $W_{k-1}$:过程噪声
- $V_k$:测量噪声
- H:由状态量向测量量转换的矩阵
变量带个帽子一般是估计值;变量右上角有个”-“一般是先验值。
流程概述
- 由上一时刻最优估计值 $\hat{X}_{k-1}$计算先验估计值 $\hat{X}_k^-$
- 获取测量值 $Z_k$
- 由上一时刻误差协方差矩阵 $P_{k-1}$计算先验误差协方差矩阵 $P_K^-$
- 计算卡尔曼增益$K_k$
- 计算最优估计值
- 更新后验误差协方差矩阵 $P_k$
- 不断更新迭代
公式说明与推导
先验估计方程
由上一时刻的最优估计值,根据运动模型推测这一时刻的状态值,即先验估计值。和传递方程类似。
后验估计方程
想要得到最优估计值,概括来说是根据数据的可靠性将测量值和计算值加权叠加起来,得到的就是后验估计值,也就是滤波过后得到的这一时刻的最优估计值。根据数据融合原理得到公式:
但是我们经常看到的都是令 $G = K_kH$ 变换后的形式,即:
其中 $K_k$∈[0, $H^-$]
- 当$K_k$ == 0 时,测量误差很大,信任计算出来的值,即 $\hat{X}_{k} == \hat{X}_{k}^-$;
- 当$K_k == H^-$时,无测量误差,信任测量值,即$\hat{X}_{k} == H^-Z_k$;
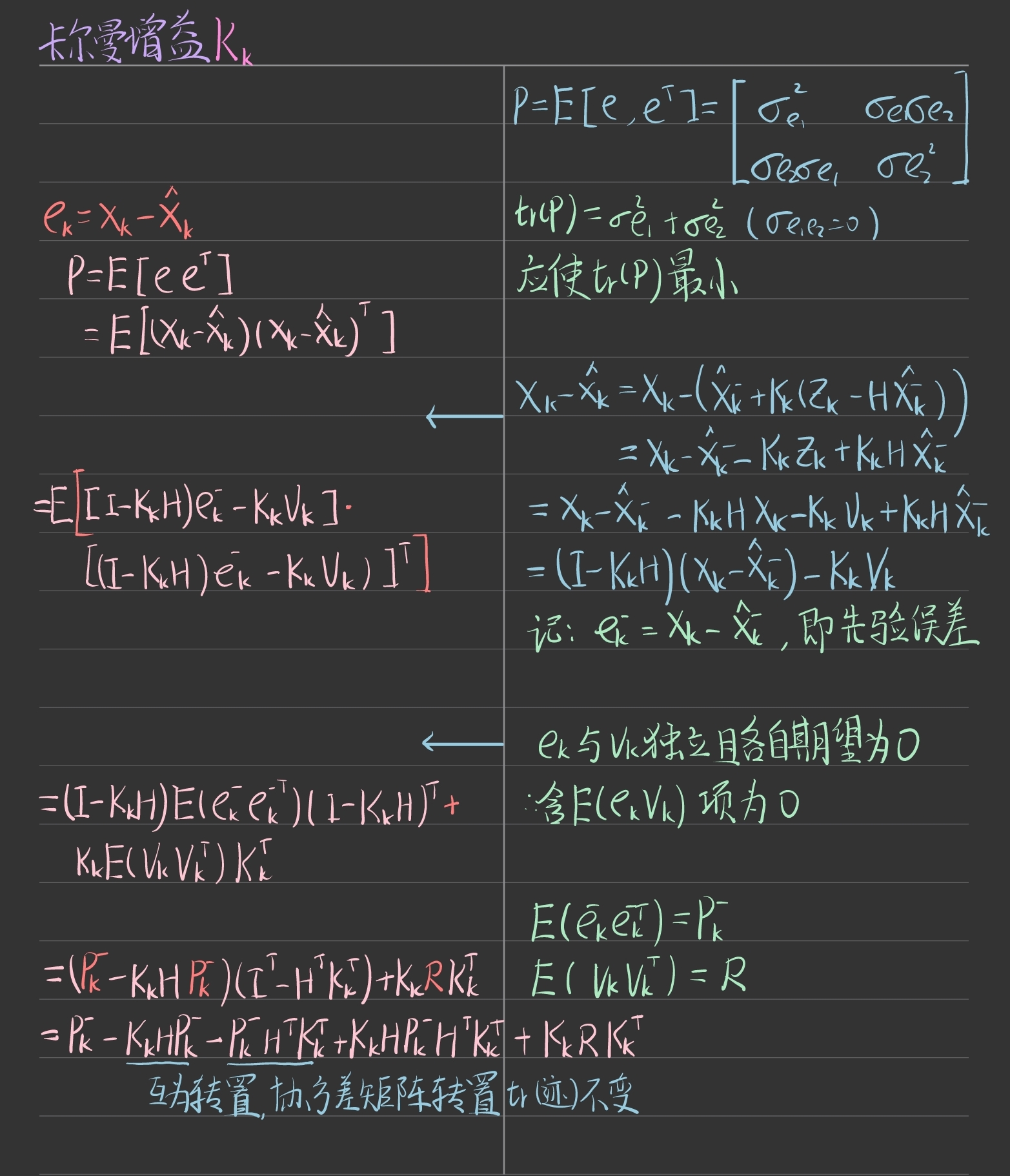
卡尔曼增益
要计算卡尔曼增益,即求出使误差协方差最小的 $k_k$,在求出其关于$K_k$ 的表达式后再求导得到极值点。
状态空间方程:
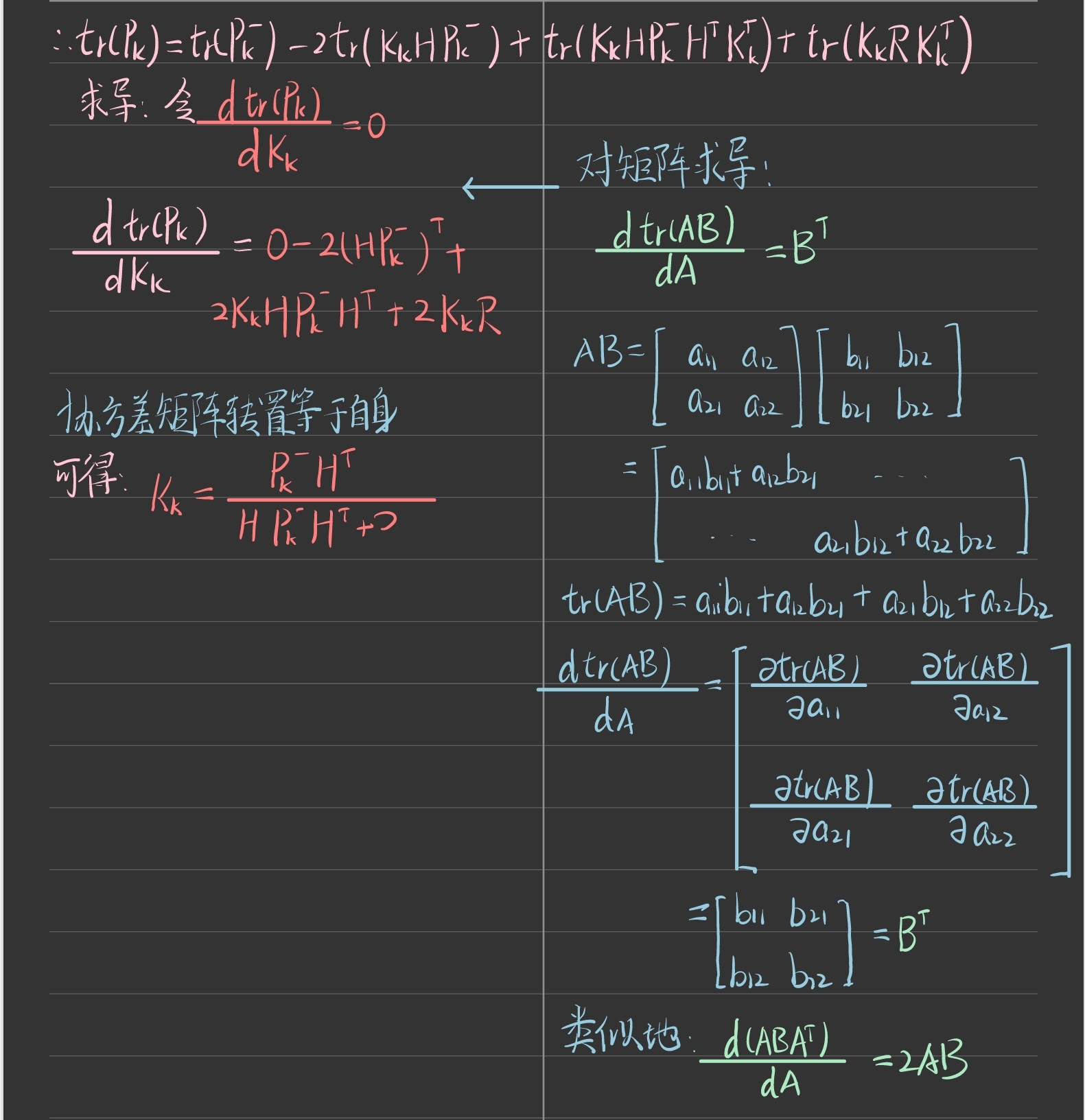
先后验误差协方差矩阵

应用举例
demo
kalman_filter
1 | void filter(Matrix_t Z) |
执行一次filter( )就是进行了一次迭代。
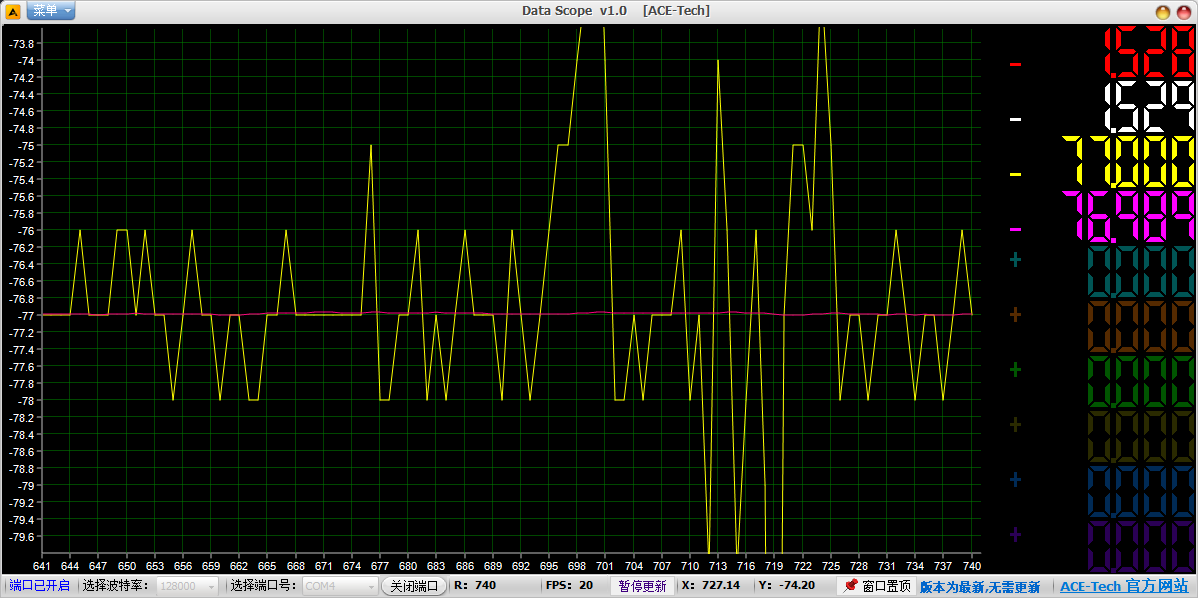
这里使用fprintf将数据打印至excel文件,绘出波形。
当然,这里还用到了一些矩阵运算函数,我写在Matrix.h里面,下次想运算矩阵就直接调用啦,非常方便。不过更多的运算函数有待进一步的完善。
- add_matrix:矩阵加法
- sub_matrix:矩阵减法
- mul_matrix:矩阵乘法
- inv_matrix:矩阵求逆
- tran_matrix:矩阵转置
MPU6050滤波
状态变量
选择angle和bias作为状态变量,其中angle为角度,bias为陀螺仪的零漂。bias就是在传感器静止时也会有的输出的角速度值,这个只是不确定的,而且会变化。但是即使我们随便给它一个初值,最终也会随着迭代次数的增加收敛到真实值附近
状态转移方程
先验协方差矩阵
测量方程
传入的只有滤波之前的角度值,故有
这里的原始角度值是由IMU的三轴加速度值直接解算而来。
后面的几个方程就没什么变化了。
写在最后
感谢大家耐心看完了本篇博客,欢迎大家分享;由于我自己也是初学者,对卡尔曼滤波的理解还不算深入,难免会有不完善之处,这篇文章作为一篇笔记由于大家分享,也欢迎大家批评指正。