D-H参数法
坐标变换矩阵
D-H参数 一般来说,想要得到两个坐标系之间的变换矩阵,需要知道六个量。但是在使用D-H 参数法时,需要按照特定方式建立坐标系,依托于这些“前提约束” ,我们只需要4个参数便可以得出两坐标系之间的变换矩阵。
先要理解坐标系的建立规定
依据这样的规定,可以发现:
z[i-1]同时垂直 于x[i-1]与x[i];
x[i]同时垂直 于z[i-1]与z[i];
由此,z[i-1]和x[i] 便成了连接坐标系[i-1]和坐标系[i]的重要参考。再看四个参数的定义
d[i] :坐标轴x[i-1]与坐标轴x[i]沿着z[i-1] 的有向距离;θ[i] :坐标轴x[i-1]与坐标轴x[i]以z[i-1] 为转轴的旋转角(逆时针,xi在前为正,或者说从x0转到x1的角度);a[i] :坐标轴z[i-1]与坐标轴z[i]沿着x[i] 的有向距离;α[i] :坐标轴z[i-1]与坐标轴z[i]以x[i] 为转轴的旋转角;
正向求解 在已知各关节角度的条件下,求出机械臂末端的坐标。
由D-H 参数可以得到坐标系变换矩阵(将其记作$T_i$ ):
代入i 系的点$(x_i,y_i,z_i)$,左乘变换矩阵$T_i$,得到这个点在i-1 系的坐标。由此,将末端坐标$C_n$不断左乘各变换矩阵,便可以递推出其在第一个坐标系的坐标$C_0$。
代码实现 主要就是两个部分
矩阵Matrix 的构建及其运算
机械臂robotic_arm 的构建及基本功能
都是直接模拟手算过程,矩阵相乘的时间复杂度是O(mnk) ,三次方量级的,好在矩阵规模都比较小。
结构体 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 typedef struct __Matrix_t { int m; int n; double matrix[Matrix_MX][Matrix_MX]; }Matrix_t; typedef struct __robotic_arm_t { int n; float d[arm_MX_nodes],a[arm_MX_nodes]; double theta[arm_MX_nodes],alpha[arm_MX_nodes]; Matrix_t *T[arm_MX_nodes]; }robotic_arm_t ;
机械臂初始化 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 robotic_arm_t *robotic_arm_init (int n, float *d, float *a, double *theta, double *alpha) { robotic_arm_t *arm; arm = (robotic_arm_t *)malloc (sizeof (robotic_arm_t )); for (int i=1 ;i<=n;i++) arm->T[i] = (Matrix_t*)malloc (sizeof (Matrix_t)); arm->n = n; for (int i=1 ;i<=n;i++) { arm->d[i] = d[i]; arm->a[i] = a[i]; arm->alpha[i] = alpha[i]; arm->theta[i] = theta[i]; } get_Trans(arm); return arm; }
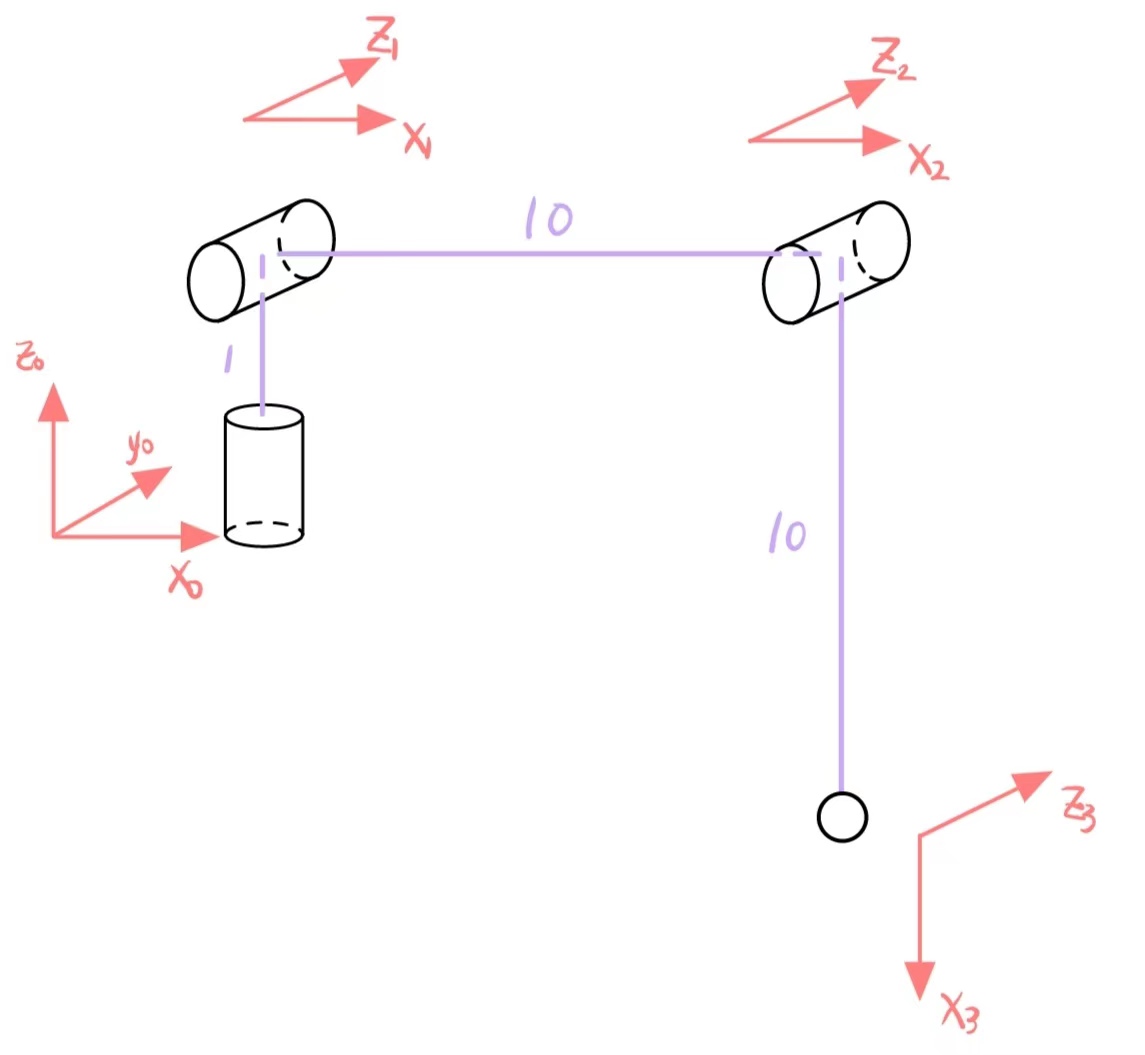
我这里构建的模型
0
1
2
3
d
0
1
0
0
θ
0
$\omega_0$
-$\omega_1$
$\frac{\Pi}{2} - \omega_2$
α
0
$-\frac{\Pi}{2}$
0
0
a
0
0
10
10
1 2 3 float test_d[4 ]={0 ,1 ,0 ,0 },test_a[4 ]={0 ,0 ,10 ,10 };double test_theta[4 ]={0 },test_alpha[4 ]={0 ,-PI/2 ,0 ,0 };test_arm = robotic_arm_init(3 ,test_d,test_a,test_theta,test_alpha);
$\omega$为关节(舵机)角度,以图中状态作为初始值,认为此时关节(舵机)角度为0。所以还有一个由关节角度到DH参数的转换函数,这个函数就是根据机械臂具体情况具体修改了。
1 2 3 4 5 6 7 8 void DH_update (robotic_arm_t *arm, double *servo) { arm->theta[1 ] = servo[0 ]; arm->theta[2 ] = -servo[1 ]; arm->theta[3 ] = PI/2 -servo[2 ]; get_Trans(arm); return ; }
计算转移矩阵T 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 void get_Trans (robotic_arm_t *arm) { for (int i=1 ; i<=arm->n; i++) { arm->T[i]->m=4 , arm->T[i]->n=4 ; arm->T[i]->matrix[0 ][0 ] = cos (arm->theta[i]); arm->T[i]->matrix[0 ][1 ] = -sin (arm->theta[i])*cos (arm->alpha[i]); arm->T[i]->matrix[0 ][2 ] = sin (arm->theta[i])*sin (arm->alpha[i]); arm->T[i]->matrix[0 ][3 ] = arm->a[i]*cos (arm->theta[i]); arm->T[i]->matrix[1 ][0 ] = sin (arm->theta[i]); arm->T[i]->matrix[1 ][1 ] = cos (arm->theta[i])*cos (arm->alpha[i]); arm->T[i]->matrix[1 ][2 ] = -cos (arm->theta[i])*sin (arm->alpha[i]); arm->T[i]->matrix[1 ][3 ] = arm->a[i]*sin (arm->theta[i]); arm->T[i]->matrix[2 ][0 ] = 0 ; arm->T[i]->matrix[2 ][1 ] = sin (arm->alpha[i]); arm->T[i]->matrix[2 ][2 ] = cos (arm->alpha[i]); arm->T[i]->matrix[2 ][3 ] = arm->d[i]; arm->T[i]->matrix[3 ][0 ] = 0 ; arm->T[i]->matrix[3 ][1 ] = 0 ; arm->T[i]->matrix[3 ][2 ] = 0 ; arm->T[i]->matrix[3 ][3 ] = 1 ; } return ; }
正向求解 1 2 3 4 5 6 7 8 9 10 11 12 13 void foward_solve (robotic_arm_t *arm, Matrix_t *point) { for (int i=arm->n; i>0 ; i--) *point = multiply_matrix2(arm->T[i],point); return ; }
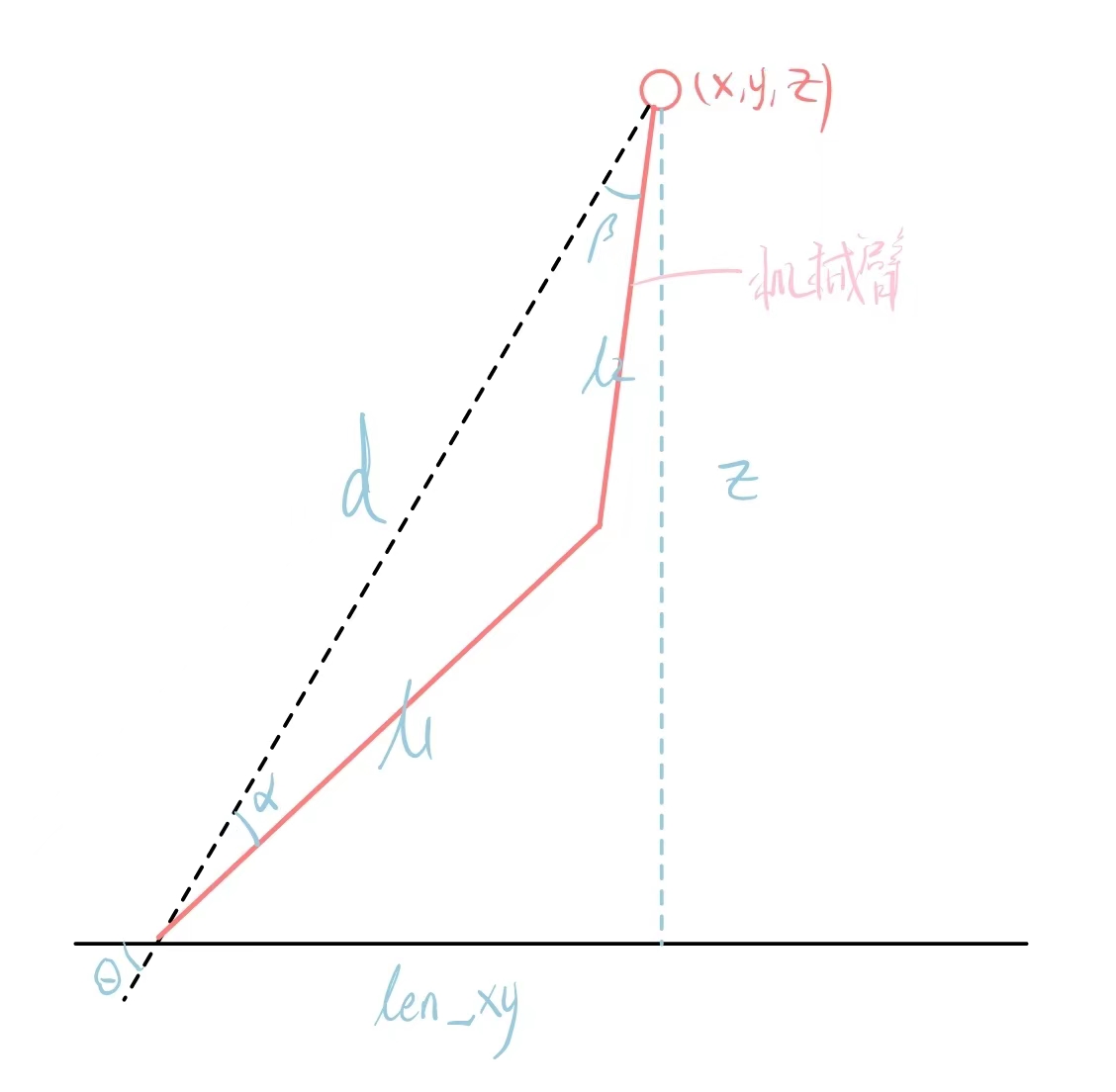
逆向求解 针对于我手上的机械臂,直接采用几何法分析。可是方程我解不出来😂,于是将其稍微变形,利用二分法 也能迅速求得符合精度要求的解。
具体二分的思路就是alpha 越大,机械臂伸得越短,alpha 越小,伸得越长。比较伸的长短是否到达
代码实现 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 void reverse_solve_dichonomy (robotic_arm_t *arm, Matrix_t point) { double angle0, angle1, angle2, alpha_l=0 , alpha_r=PI, alpha_mid, beta, theta, len_xy, x, y, z, l1, l2, d; x = point.matrix[0 ][0 ], y = point.matrix[1 ][0 ], z = point.matrix[2 ][0 ] - arm->d[1 ]; d = sqrt (x*x + y*y + z*z); l1 = arm->a[2 ], l2 = arm->a[3 ]; len_xy = sqrt (x*x + y*y); if (len_xy == 0 ) {theta = PI/2 ;} else {theta = atan (z/len_xy);} while (alpha_r-alpha_l > 0.00175 ) { alpha_mid = (alpha_l+alpha_r)/2 ; beta = asin (sin (alpha_mid)*l1/l2); if (l1*cos (alpha_mid) + l2*cos (beta) > d) {alpha_l = alpha_mid;} else {alpha_r = alpha_mid;} } if (x == 0 ) {angle0 = PI/2 ;} else {angle0 = atan (y/x);} angle1 = theta - alpha_mid; angle2 = alpha_mid + beta + PI/2 ; arm->theta[1 ] = angle0; arm->theta[2 ] = -angle1; arm->theta[3 ] = PI/2 - angle2; return ; }
我也尝试了使用MATLAB解方程,得出的结果十分的复杂,我觉得还是直接用二分法比较好。
粒子群优化算法 在之前的逆解过程中,只能针对单个机械臂的几何特征单独求解,不具有泛用性。而且以我的数学水平也只能求解结构简单的机械臂🤣,当关节数增加甚至冗余时,无法直接用数学方法求解,或者说是多解。所以尝试采用粒子群优化算法(Particle Swarm Optimization, PSO) 来实现一种通用的解法。
这位大佬写得非常详细,我这里是使用c语言实现的,并将其用在了机械臂逆解上面。
代码实现 基本流程
粒子群初始化及各粒子随机初始化
开始迭代
计算适应值
更新个体及群体最优解与最优适应值
更新w值,粒子速度,粒子位置
结束迭代
返回寻得的最优解
结构体 看完上面的博客之后,想必这些定义是很容易理解的
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 typedef struct __bird_t { double X[arm_MX_nodes], V[arm_MX_nodes]; double opt_X[arm_MX_nodes]; double opt_A; }bird_t ; typedef struct __bird_population_t { int N, D, K; double W, C_ind, C_pop; double opt_X_pop[arm_MX_nodes]; double opt_A_pop; bird_t *bird[N_MX_SIZE]; }bird_population_t ;
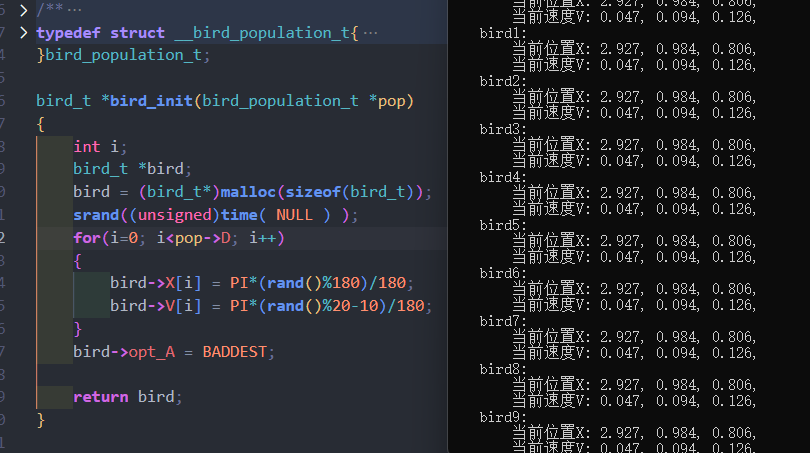
初始化 单个粒子的初始化,至于为什么要用 ‘bird’ 来命名呢,因为这个算法其实也算是一种仿生的思路,作者是受到鸟群觅食的启发发明了这个算法。我第一眼看到这个算法想到的就是遗传算法,其实感觉都是优化的搜索方法,不过相比于遗传算法此算法在求机械臂逆解的应用中更胜一筹,具体怎么个优势法还有待去研究研究。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 bird_t *bird_init (bird_population_t *pop) { int i; bird_t *bird; bird = (bird_t *)malloc (sizeof (bird_t )); for (i=0 ; i<pop->D; i++) { bird->X[i] = PI*(rand()%180 )/180 ; bird->V[i] = PI*(rand()%20 -10 )/180 ; } bird->opt_A = BADDEST; return bird; } bird_population_t *bird_population_init (int n, int d, int k, double w, double c_ind, double c_pop) { bird_population_t *bird_population; bird_population = (bird_population_t *)malloc (sizeof (bird_population_t )); bird_population->N = n, bird_population->D = d, bird_population->K = k; bird_population->W = w, bird_population->C_ind = c_ind, bird_population->C_pop = c_pop; srand((unsigned )time( NULL ) ); for (int i=0 ; i<n; i++) { bird_population->bird[i] = bird_init(bird_population); } bird_population->opt_A_pop = BADDEST; return bird_population; }
迭代过程 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 for (i=0 ; i<bird_pop->K; i++) { for (j=0 ;j<bird_pop->N;j++) { Matrix_t *judge_point = point_init(0 ,0 ,0 ); double ada=0 ; DH_update(arm,bird_pop->bird[j]->X); foward_solve(arm,judge_point); ada += (point.matrix[0 ][0 ] - judge_point->matrix[0 ][0 ])*(point.matrix[0 ][0 ] - judge_point->matrix[0 ][0 ]); ada += (point.matrix[1 ][0 ] - judge_point->matrix[1 ][0 ])*(point.matrix[1 ][0 ] - judge_point->matrix[1 ][0 ]); ada += (point.matrix[2 ][0 ] - judge_point->matrix[2 ][0 ])*(point.matrix[2 ][0 ] - judge_point->matrix[2 ][0 ]); if (ada < bird_pop->bird[j]->opt_A) { bird_pop->bird[j]->opt_A = ada; for (k=0 ; k < arm->n; k++) {bird_pop->bird[j]->opt_X[k] = bird_pop->bird[j]->X[k];} } if (ada < bird_pop->opt_A_pop) { bird_pop->opt_A_pop = ada; for (k=0 ; k < arm->n; k++) {bird_pop->opt_X_pop[k] = bird_pop->bird[j]->X[k];} } w = W_MAX - (W_MAX - W_MIN)*((double )i/bird_pop->K); for (k=0 ; k < arm->n; k++) { bird_pop->bird[j]->V[k] = (w+(rand()/16384 -1 )*0.15 )*(bird_pop->bird[j]->V[k]) + (rand()/16384 )*1.8 *(bird_pop->opt_X_pop[k] - bird_pop->bird[j]->X[k]) + (rand()/16384 )*1.6 *(bird_pop->bird[j]->opt_X[k] - bird_pop->bird[j]->X[k]); bird_pop->bird[j]->V[k] = (bird_pop->bird[j]->V[k] > V_MAX) ? V_MAX : bird_pop->bird[j]->V[k]; bird_pop->bird[j]->V[k] = (bird_pop->bird[j]->V[k] < V_MIN) ? V_MIN : bird_pop->bird[j]->V[k]; bird_pop->bird[j]->X[k] += bird_pop->bird[j]->V[k]; bird_pop->bird[j]->X[k] = (bird_pop->bird[j]->X[k] > X_MAX) ? X_MAX : bird_pop->bird[j]->X[k]; bird_pop->bird[j]->X[k] = (bird_pop->bird[j]->X[k] < X_MIN) ? X_MIN : bird_pop->bird[j]->X[k]; } printf (" bird%d: \r\n 当前位置X: " ,j); for (int m=0 ; m<arm->n; m++) {printf ("%.3f|%.1f, " ,bird_pop->bird[j]->X[m],rad_angle(bird_pop->bird[j]->X[m]));} printf ("\r\n 当前速度V: " ); for (int m=0 ; m<arm->n; m++) {printf ("%.3f|%.1f, " ,bird_pop->bird[j]->V[m],rad_angle(bird_pop->bird[j]->V[m]));} printf ("\r\n" ); free (judge_point); } printf ("%d 最适值: %.3f 惯性w: %.3f\r\n" ,i,bird_pop->opt_A_pop,w); printf (" 角度X: " ); for (k=0 ; k < arm->n; k++) {printf ("%.2f|%.1f " ,bird_pop->opt_X_pop[k],rad_angle(bird_pop->opt_X_pop[k]));} printf ("\r\n" ); }
一些小细节
可以看到,虽然我添加了时间随机数种子,但是生成的粒子仍然是全都一样的。这里要将srand((insigned)time(NULL));提前至初始化函数外。
w = W_MAX - (W_MAX - W_MIN)*((double)i/bird_pop->K); 在给w 加权的时候别忘了double,不然后面算出来一直是0。
写在最后 感谢大家耐心看完了本篇博客,如果觉得不错的话欢迎分享给他人。由于本人水平有限,难免有错误的地方,也欢迎在评论区批评指正。完整的代码可以在我的代码仓库找到,后续也会将其移植到STM32上。在这里贴上主要代码方便随时查看,思路与代码相互对照也更容易理解。