Infantry-下供弹步兵
前言
这次考核我尝试了将步兵代码进行重构,并完成一些基本功能。新的代码主要从面向对象的角度出发,涉及到常用硬件接口、常用算法封装、机器人各部件封装等。新的代码有很多地方参考了原来的工程代码,也十分感激历届学长学姐的工作,使我能站在巨人的肩膀上进行新工程的开发,参与此次考核。
原来的工程已经有了完备稳健的功能,也经过了长时间的实践验证,但是我觉得它可能还不是很便于继承与二次开发,这也是我想尝试重新撰写代码的原因之一。结合参与考核过程中实际体验,我觉得可能存在以下几方面的问题:
- 头文件引用方式不太健康,循环引用,编译效率低,容易因为文件编译顺序问题导致报错,同一个地方的错误会被编译器多次报错;
- 易产生依赖性,变量声明和引用的位置比较随机,代码之间耦合度过高,你中有我我中有你,错综复杂,各功能模块难以独立使用或移植;
- 有一些注释可能是跟代码一块复制过来的,代码修改了而注释没有修改,容易让人产生误解。
目前的新代码可实现一定的基本功能,然而其完整度还远远不够,部分新想法仍处于理论阶段,有待进一步实践验证。
仓库链接
代码规范
命名规范
命名总体依据《RM2022嵌软组编程规范》,不过有一些地方没有严格依据此规范,有以下三种情况:
- 一开始没记清楚,结构体类型定义使用的是大驼峰,而结构体变量与一般变量混淆,均使用了一般变量命名规范
- 在常见数据结构对象中,特定变量类型相对固定化,从使命名更简洁的角度出发,没有额外添加命名标识。
- 直接沿用了老代码中的一些功能模块,暂时没有全部修改掉。
函数
一段代码是否有必要封装成函数,大概可以从这三个角度来看:
- 按功能来写:将实现某一功能的代码块集合封装起来,可以提高代码可读性,使主干代码更简明清晰,便于替换。
- 按调用来写:如果有一些代码相似度比较高,多次出现,那么便考虑封装起来,比如原先Gimbal代码中向各个电机发送电流这一部分,或者对不同数据使用低通滤波一部分。
- 按对象来写:如果一部分代码应当作为某一个对象应有的功能,那么应该封装起来,并附属在对象中,也可以提高互换性。
对象封装与分类
大致可以分为常用硬件接口、常用算法封装、机器人各部件封装,任务层可直接调用相对完整的对象接口来进行状态更新,行为决策等,因此,文件大致分放至4个文件夹
- Algorithm : 常用算法封装
- Hardware : 系统与引脚配置
- Software : 机器人各部件的抽象与封装
- Tasks : 任务调度
具体文件关系可参考下一部分的 头文件管理图
头文件管理
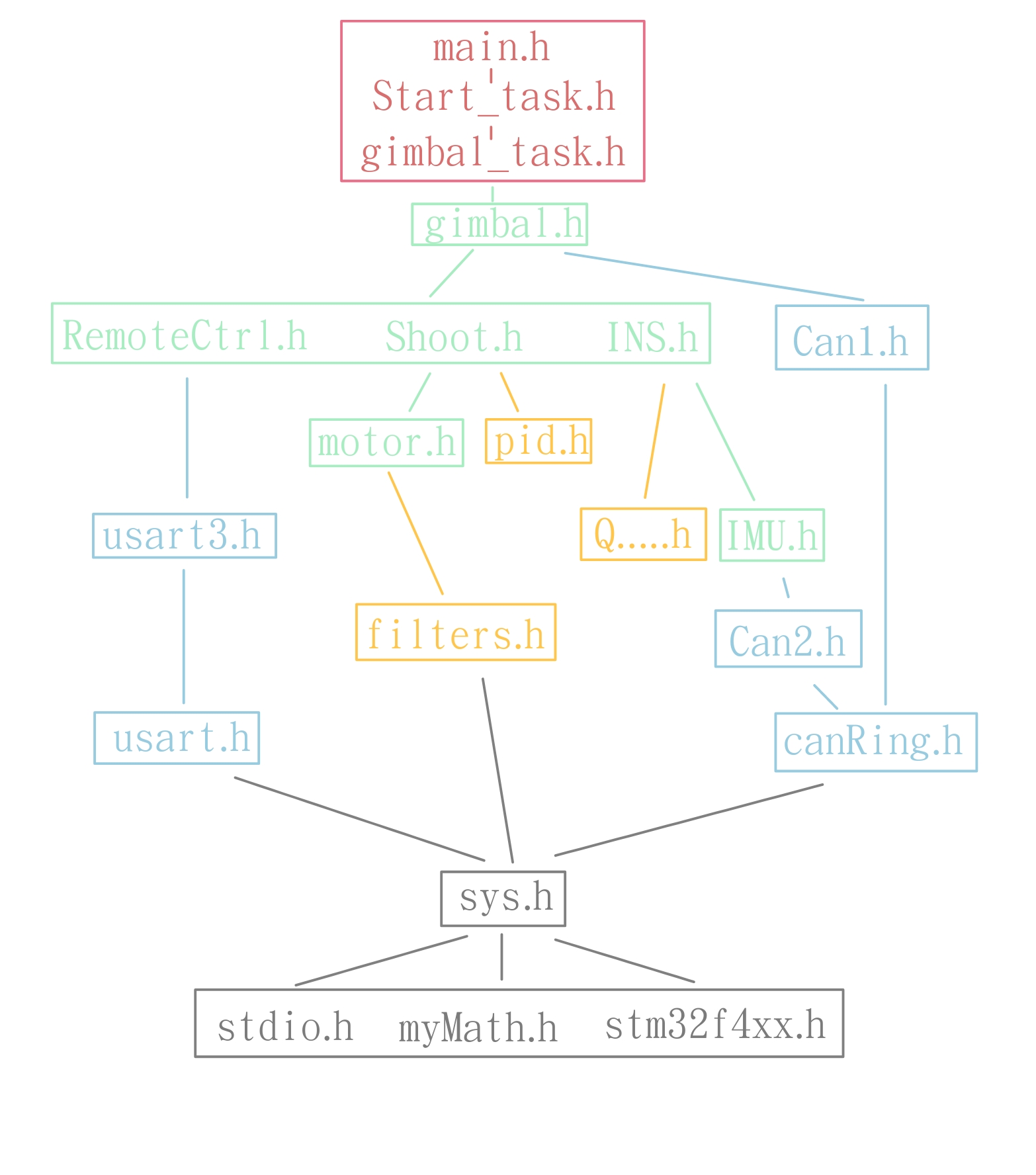
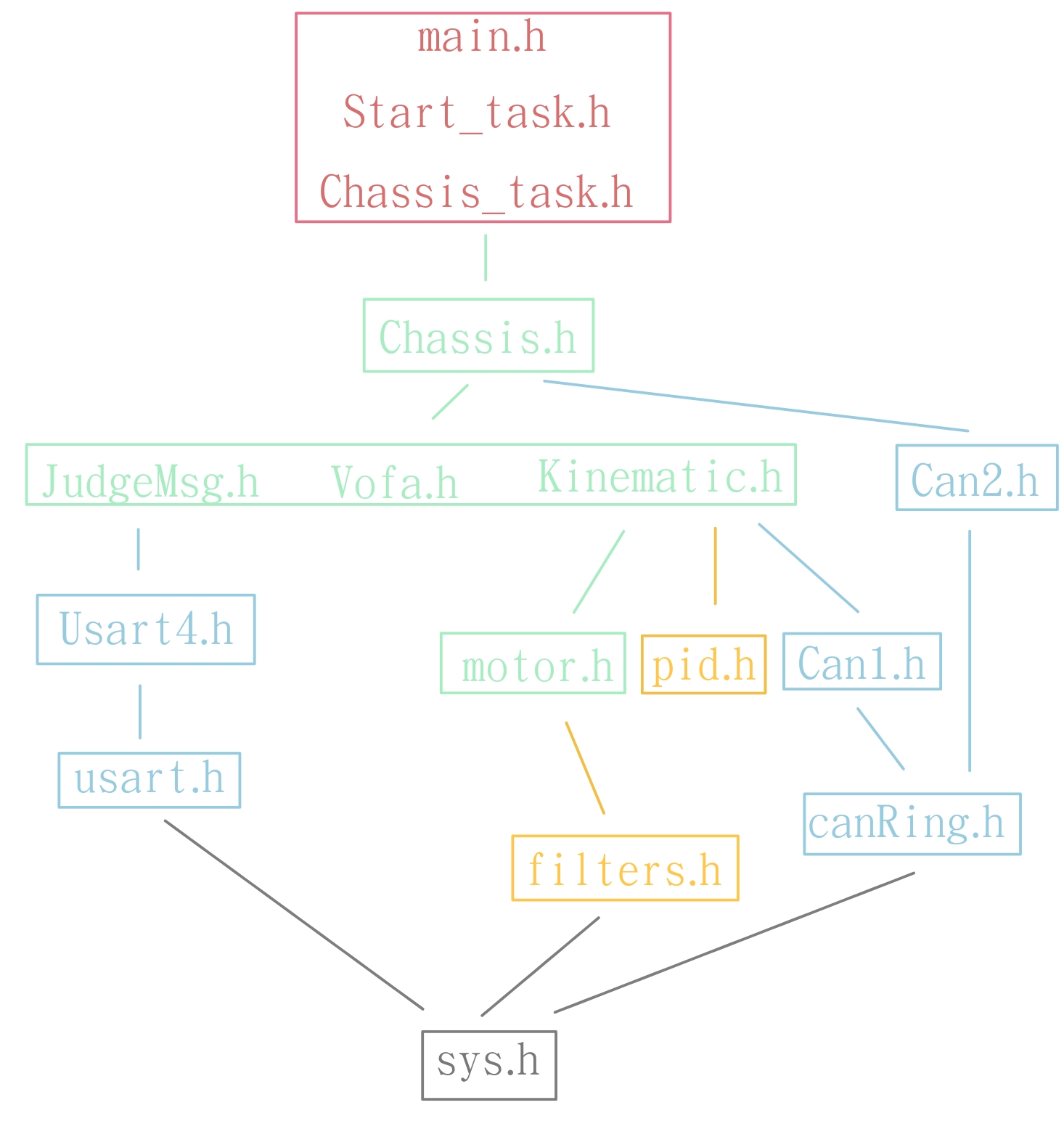
新的工程避免了头文件之间的循环引用,采用层层引用的方式,这也为各个功能模块的独立性、互换性、可移植性提供了保障。
下面两张图列出了大致的头文件关系,不过限于画板大小,并没有展示所有的头文件关系。
- 红色 : Tasks
- 绿色 : Software
- 蓝色 : Hardware
- 橙色 : Algorithm
- 灰色 : 标准库与个人库
Gimbal
Chassis
接下来开始具体介绍各个结构体的功能,更为详细的代码说明可能要等之后总结一个 调试日志 一并写出。
Hardware
串口,can通信之类的外设,因为他们的中断函数是固定的,想要在中断函数里处理数据,便常常需要引用上层变量,这就会导致相互引用的问题。所以我尝试将他们的中断状态与数据封装起来,上层可以根据外设的状态便可以适时处理数据。同时接口相同,也可以方便上层修改要用的外设。
Usart接口
位于 usart.h
1
2
3
4
5
6
7
8
9
10
11
12
|
typedef struct __UsartIF_t{
uint8_t rx_flag;
uint8_t *rx_buf;
uint8_t tx_flag;
uint8_t *tx_buf;
}UsartIF_t;
void usartIfInit(UsartIF_t *usart_if, uint8_t rxbuf_len, uint8_t txbuf_len,void (*usart_init)(void));
|
通过对老代码的阅读,感觉串口消息的读取方式更多为判断是否已经接收到数据,然后选择读取数据。上层选择应该分配到的Usart接口,根据需要的数据长度动态分配缓冲区的长度,之后再适时读取或发送数据即可。
通过封装之后,下层的Usart代码无需知晓上层指定的缓冲区地址,上层只需要单向引用即可,并且如果需要更换接口的话,只需要修改自身的串口指针即可。
Can接口
大致思路为中断函数中将消息添加到缓冲区域,更新状态。上层使用的时候直接读取缓存器中最新的数据即可。
链表实现
位于 Can.h
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
|
typedef struct __CanMsgNode_t {
CanRxMsg msg;
struct __CanMsgNode_t *next;
struct __CanMsgNode_t *prev;
}CanMsgNode_t;
typedef struct __CanMsgList_t {
uint8_t num;
CanMsgNode_t *head;
CanMsgNode_t *tail;
SemaphoreHandle_t mutex;
}CanMsgList_t;
void addCanMsg(CanMsgList_t* list, CanRxMsg new_msg);
|
在一开始我尝试使用链表来作为缓冲器,但是较为繁琐,容易内存泄漏,所以之后又换了一种方式。
环形缓存器
位于 CanRing.h
1
2
3
4
5
6
7
8
9
10
11
12
|
typedef struct __CanRing_t {
CanRxMsg msg[CAN_RING_SIZE];
short head;
short tail;
}CanRing_t;
void pushCanMsg(CanRing_t *ring, CanRxMsg new_msg);
uint8_t canRingHasMsg(CanRing_t *ring);
CanRxMsg popCanMsg(CanRing_t *ring);
|
在中断函数中将接收到的数据使用pushCanMsg 将数据添加到缓存器中,上层将自己的缓存器指针赋值为分配到的缓存器,在需要读取数据的时候使用popCanMsg读取最新数据即可。
Algorithm
矩阵运算库
位于 Matrix.h
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
|
typedef struct __Matrix_t{
int m;
int n;
double matrix[INV][INV];
}Matrix_t;
Matrix_t get_I(int t);
Matrix_t inv_matrix(Matrix_t M);
Matrix_t tran_matrix(Matrix_t M);
Matrix_t matrix_init2(int m, int n);
void swap_col(int i, int j, Matrix_t *M);
void swap_row(int i, int j, Matrix_t *M);
void fprintf_matrix(Matrix_t *mat, FILE *fp);
Matrix_t add_matrix(Matrix_t m1, Matrix_t m2);
Matrix_t sub_matrix(Matrix_t m1, Matrix_t m2);
Matrix_t mul_matrix(Matrix_t m1, Matrix_t m2);
Matrix_t numul_matrix(Matrix_t m1, double num);
Matrix_t numdiv_matrix(Matrix_t m1, double num);
void add_row(int i, int j, double k, Matrix_t *M);
void add_col(int i, int j, double k, Matrix_t *M);
Matrix_t matrix_init(int m, int n, double matrix[][INV]);
|
在实现 递推最小二乘法 和 卡尔曼滤波器 以及后续如果要继续使用到现代控制理论中相关算法的时候,C语言矩阵运算是不可避免的。这是我自己写的一个简易矩阵运算库,包含一些基本功能。
我使用这个库实现了一个卡尔曼滤波器的demo,应该是没有什么问题的(或许)。其实我有使用过其他人开源的一些运算库,但是感觉不太好用(比如一个库在运算的时候会将自身的值改变,debug才发现)。
不过这份代码仍然需要优化一下,因为省事我直接给matrix分配了 INV x INV 的空间,但是这样显然是不够具有普适性的。比较好的一个写法是使用 一阶指针 动态分配空间,在运算时根据m、n 手动划分矩阵。
滤波器
位于 filters.h
一阶低通滤波
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
|
#define K_CHASSIS 0.01f
#define K_CHASSIS_STEERING 0.03f
#define K_WHEEL 0.1f
#define K_CURRENT 0.1f
typedef struct __LowPass_t {
float tf;
float K;
float last;
TickType_t ts;
} LowPass_t;
void lowPassInit(LowPass_t *lp, float K);
void lowPassInitTS(LowPass_t *lp, float tf);
float lowPass(LowPass_t *lp, float input);
float lowPassTS(LowPass_t *lp, float input);
|
参考老代码,一阶低通滤波器使用lowPassInit、lowPass这两个函数即可。不过另外一种实现方式经过测试也是可以用的。
卡尔曼滤波器
1
2
3
4
5
6
| typedef struct __KalmanFilter_t {
Matrix_t x, P, Q, R, H, F, B, u, z, K;
float dt, t;
} KalmanFilter_t;
void updateKF(KalmanFilter_t *kf, Matrix_t z);
|
暂时没用到。
RLS-递推最小二乘
位于 RLS.h
1
2
3
4
5
6
7
8
9
10
11
12
|
typedef struct __RLS_t{
int dim;
Matrix_t theta;
Matrix_t P;
float lambda;
}RLS_t;
void rlsInit(RLS_t *rls, int dim, double theta[][INV], double P[][INV], double lambda);
void rlsUpdate(RLS_t *rls, double *x_in, double y);
|
用于动态拟合底盘电机功耗模型的几个参数。相较于原先使用SD卡存储数据然后使用MATLAB进行拟合,使用RLS直接在开发板拟合是一种在线的拟合方式,在运行过程中,如果参数发生了一些变化也可以实时跟踪(不过不清楚是不是有必要)。拟合参数只有3个,运算量也不是很大,如果运算能力吃紧,也可以暂停拟合。

这是使用RLS算法对有变化的参数的拟合与跟踪,数据目前是随机生成的,还没有在车子上实际测试过。
常用数学工具
位于 myMath.h
一元二次方程求解
1
2
3
4
5
6
7
| typedef struct __Roots_t{
int isReal;
double Re[2];
double Im[2];
} Roots_t;
Roots_t solveQuadratic(double a, double b, double c);
|
Software
Motor
位于 Motor.h
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
| typedef enum __MotorTypeEnum {
RM2006,
RM3508,
RM6020
}MotorTypeEnum;
typedef struct __Motor_t {
MotorTypeEnum type_enum;
float current_ratio;
float rpm_rad;
float max_voltage;
float max_current;
uint16_t id;
uint8_t temperature;
float speed;
float last_speed;
float target_speed;
float current;
short target_current;
float angle;
float last_angle;
uint8_t revolutions;
LowPass_t lp_spd;
LowPass_t lp_cut;
}Motor_t;
|
电机状态(如speed、angle)直接使用float类型,在更新函数中已经进行了转化。新工程中具有物理意义的变量都使用标准单位。
Kinematic
位于 Kinematic.h
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
|
typedef struct __Kinematic_t {
Velocity_t real_vel;
Velocity_t target_vel;
Motor_t motor[4];
Pid_t pid_speed[4];
Pid_t pid_angle[4];
Motor_t steering_motor[4];
Pid_t steering_pid_angle[4];
Pid_t steering_pid_speed[4];
CanRing_t *can_ring;
CanRing_t *can_ring_steering;
CAN_TypeDef *can_tx;
} Kinematic_t;
void kinematicInit(Kinematic_t *kinematic, CAN_TypeDef *can_tx, CanRing_t *can_ring);
void forKinematic(Kinematic_t *kinematic);
void invKinematic(Kinematic_t *kinematic);
void updateWheels(Kinematic_t *kinematic);
void setMotorCurrent(Kinematic_t *kinematic);
|
我想让底盘根据不同的轮组类型自动分配不同的运动解算结构体(因为解算差异较大,似乎不好直接用函数),但是这样的话似乎没法在声明的时候就确定数据类型,所以最后采用了预编译的实现方式来进行选择。
这里的Can接口是由上层分配的,但是感觉一个函数将配置用的形参再传给下一个函数不是太合理,直接在本层配置通信接口也不错。
Judge
位于 JudgeMsg.h
1
2
3
4
5
6
7
8
9
10
11
12
13
|
typedef struct __Judge_t {
JudgeRecv_t recv_msg;
UsartIF_t *usart_if;
uint8_t *recv_flag;
uint8_t *send_flag;
}Judge_t;
void judgeInit(Judge_t *judge, UsartIF_t *usart_if);
void recvJudgeMsg(Judge_t *judge);
|
可以使用与老代码中类似的逻辑来适时更新裁判数据,串口的DMA会自动覆盖数据,也就可以保证读取到的数据一直都是最新消息。
Chassis
位于 Chassis.h
1
2
3
4
5
6
7
8
9
10
11
12
13
14
|
typedef struct __Chassis_t {
ChassisTypeEnum type_enum;
StateFlag_t state;
Kinematic_t kinematic;
Judge_t judge;
CAN_TypeDef *gimbal_canTx;
CanRing_t *gimbal_canRx;
short pitch_100;
short yaw_100;
}Chassis_t;
|
功能目前只添加了裁判系统、运动控制、板件通信
RemoteCtrl
位于 RemoteCtrl.h
1
2
3
4
5
6
7
8
9
10
11
12
13
14
|
typedef struct __RC_t{
Stick_t stick;
Mouse_t mouse;
Key_t key;
uint8_t dis_cnt;
UsartIF_t *usart_if;
}RC_t;
void remoteCtrlInit(RC_t *rc);
void updateRC(RC_t *rc);
|
检测usart_if->rx_flag即可判断有无数据,选择更新。
IMU
位于 IMU.h
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
|
typedef struct __IMU_t {
float g_norm;
float gyro[3];
float gyro_offset[3];
float acc[3];
float acc_scale;
CanRing_t *can_rx;
}IMU_t;
void imuInit(IMU_t *imu);
void recvData(IMU_t *imu);
void updateIMU(IMU_t *imu);
void calibrateIMU(IMU_t *imu);
|
参考老代码中的逻辑进行了封装,矫正函数进行了修改。
INS
位于 ins.h
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
| typedef struct __INS_t {
float q[4];
float Gyro[3];
float Accel[3];
float MotionAccel_b[3];
float MotionAccel_n[3];
float AccelLPF;
float xn[3];
float yn[3];
float zn[3];
float atanxz;
float atanyz;
float Roll;
float Pitch;
float Yaw;
float YawTotalAngle;
float LastYaw;
float LastPitch;
float PitchSpeed;
float YawSpeed;
float PitchLastSpeed;
float YawLastSpeed;
float PitchSpeedLPF;
float YawSpeedLPF;
IMU_t imu;
SemaphoreHandle_t mutex;
} INS_t;
|
这个基本是直接沿用的老代码中的结构体,添加了一个 imu 成员,只要保证IMU给出的接口是一样的,即使换了一种类型的imu,也可以比较方便的更新代码。
添加互斥锁是因为更新和读取 ins分别是在两个任务中进行的。
Gimbal
位于 Gimbal.h
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
|
typedef struct __GimPosture_t {
float tar_yaw;
float tar_pitch;
float theta;
float theta0;
uint8_t yaw_mode;
Motor_t moto_yaw;
Motor_t moto_pitch;
Pid_Typedef yaw_spd_pid;
Pid_Typedef pitch_spd_pid;
Pid_Typedef yaw_pos_pid;
Pid_Typedef pitch_pos_pid;
}GimPosture_t;
void posUpdate(GimPosture_t *pose);
typedef struct __Gimbal_t {
RC_t rc;
INS_t ins;
Shoot_t shoot;
Velocity_t vel;
GimPosture_t pose;
ChassisInfo_t chassis;
}Gimbal_t;
|